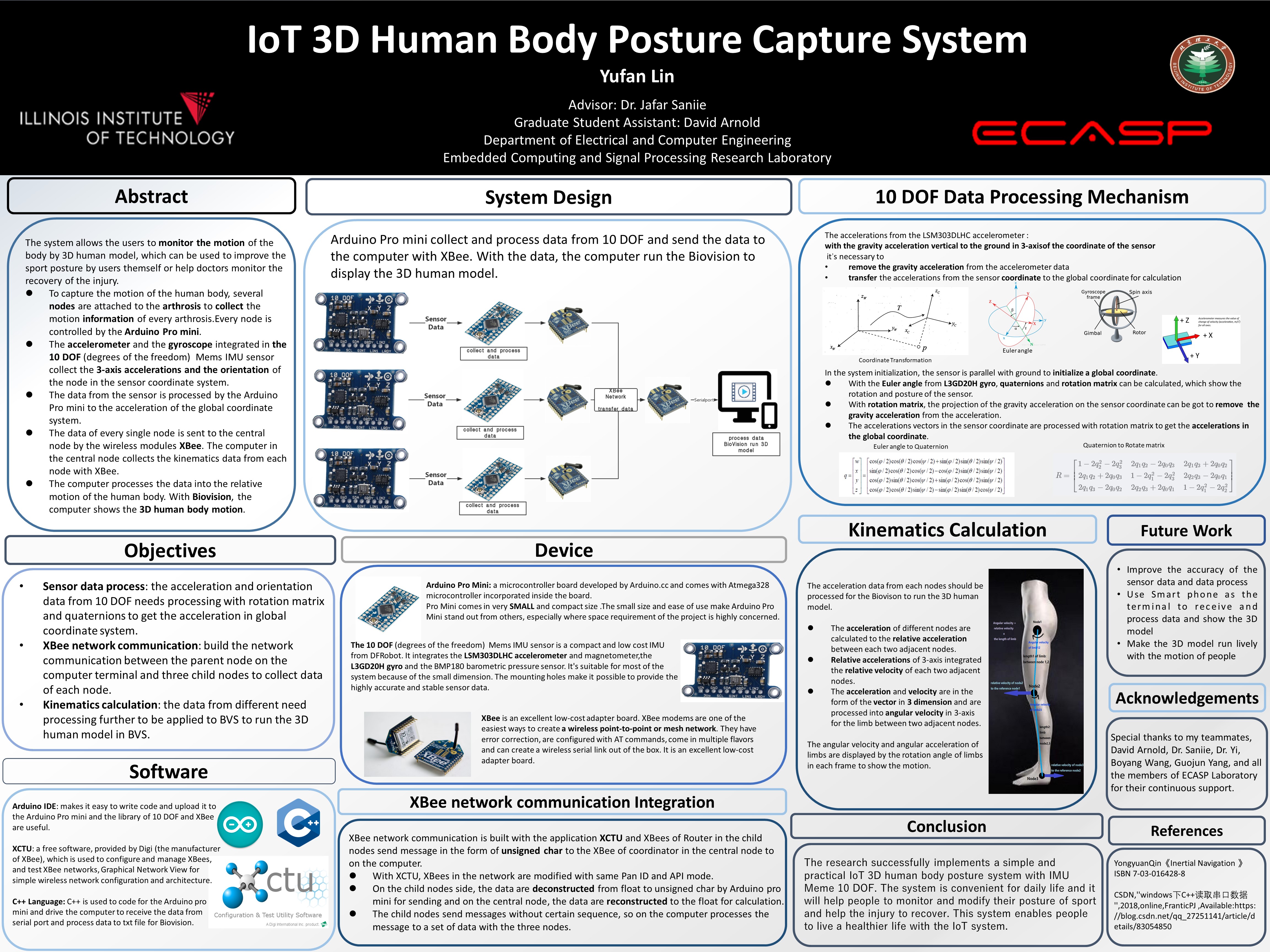
The system allows the users to monitor the motion of the body by 3D human model, which can be used to improve the sport posture by users themselves or help doctors monitor the recovery of the injury.
To
capture the motion of the human body, several nodes are attached to
the
arthrosis to collect the
motion
information of
every arthrosis. Every node is controlled by the Arduino Pro mini.
The accelerometer
and
the gyroscope
integrated in the 10 DOF
(degrees of the freedom) Mems IMU sensor collect the 3-axis
accelerations and the orientation of the node in the sensor coordinate
system.
The
data from the sensor is processed by the Arduino Pro mini to the acceleration
of the global coordinate system.
The
data of every single node is sent to the central node by the wireless modules XBee. The
computer in
the central node collects the kinematics data from each node with XBee.
The
computer processes the
data into the relative motion of the human body. With Biovision, the
computer
shows the 3D
human body motion.
![Xiaonan Li [A20454331].jpg](http://ecasp.ece.iit.edu/testxe/files/attach/images/9565/603/009/136991e8b289a79a1e2eabfddcc5809d.jpg)
 Real-time Target Tracking Car based on OpenCV and ROS
Real-time Target Tracking Car based on OpenCV and ROS
 Computer Vision Based Autonomous Robotic Arm
Computer Vision Based Autonomous Robotic Arm










