Automated Sorting Machine using Video Processing and a Robotic Arm
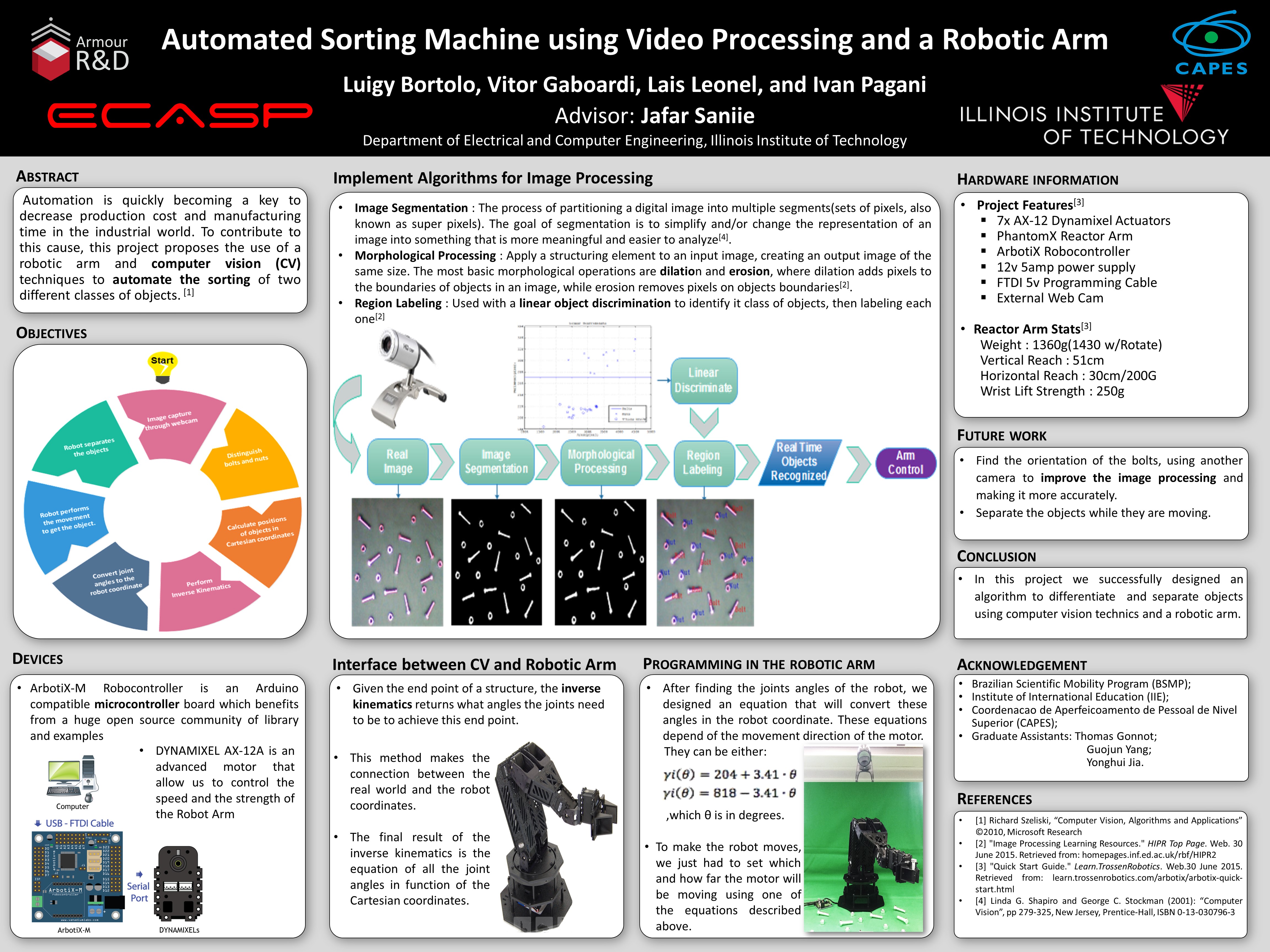
Most manufacturing firms nowadays are looking for the automation of their systems, in other words, they want to develop machines and robots that will replace people in doing some tasks, making their system more efficient and economic. The purpose of this research is to develop a system that is capable of discriminate between bolts and nuts using real-time video processing and utilize a robotic arm to separate these two objects.
This implies the necessity of utilizing a camera to capture the whole area in which all the bolts and nuts will be at, the processing of the video using several functions in the OpenCV library, develop the inverse kinematics to find the angles of the robot joints needed to achieve a specific object, create an algorithm in Arduino to send the commands to the microcontroller to control the robot and finally, develop the serial communication between the Image Processing algorithm and the Arduino in order to make the whole system automated.
(Click poster to enlarge)
 Real-Time Automated Target Tracking System
Real-Time Automated Target Tracking System
 Portable Wireless Health Monitoring System
Portable Wireless Health Monitoring System




