Abstract
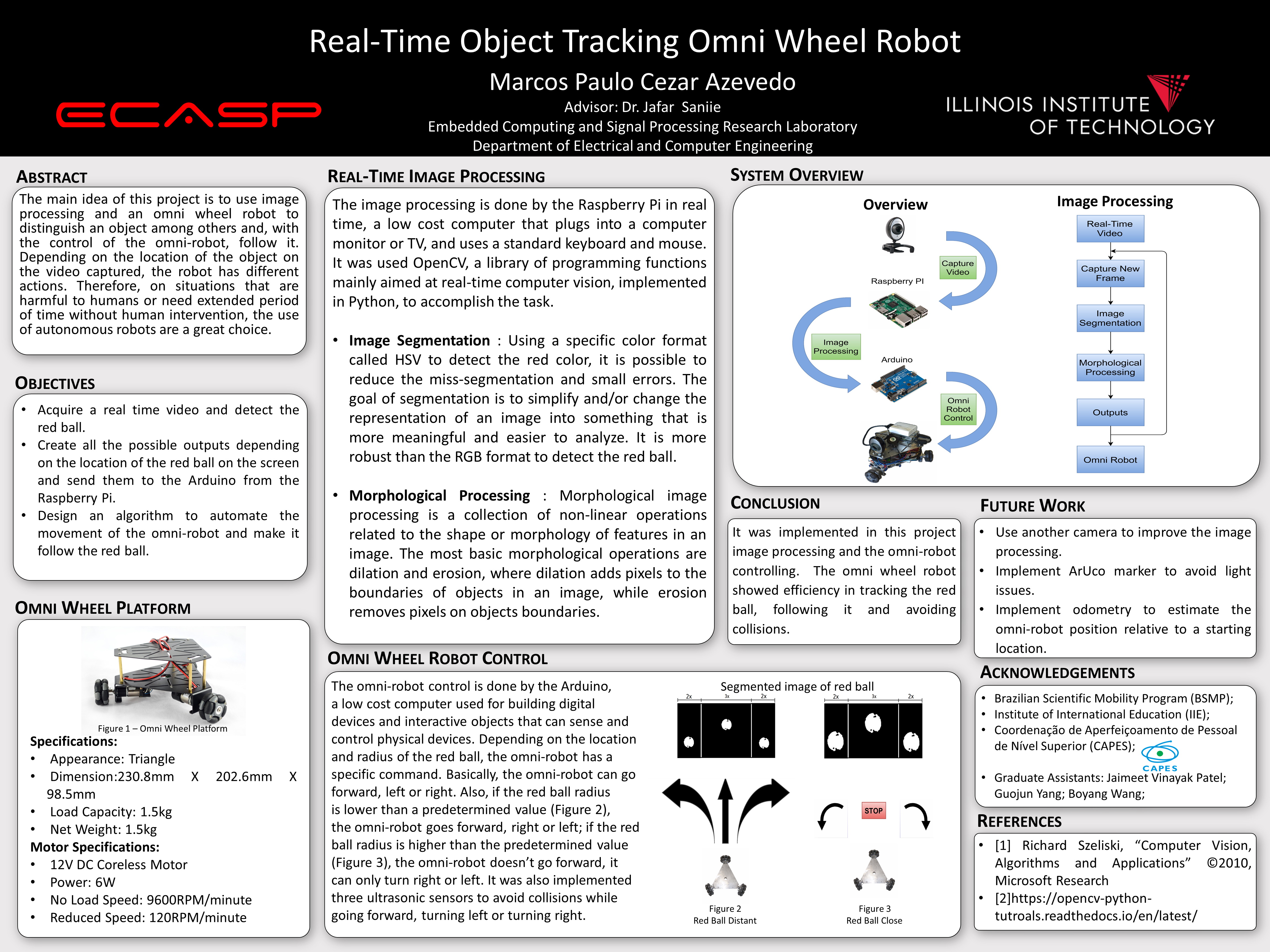
This project aims to develop a system for recognition and tracking of a red ball utilizing digital image processing and an omni wheel robot. Basically, this project is divided on three main parts: the first one being digital image processing, which involves recognizing only the red ball among different objects on a real-time video, the second one is the real time communication between a Raspberry Pi, which is the responsible of doing the image processing, and an Arduino, which is responsible of controlling the motors of the omni wheel robot, the third is to create an algorithm to control the motors based on the location of the red ball on the video.
Students' Poster (Click to enlarge)
 Digital Oscilloscope and Signal Processing System
Digital Oscilloscope and Signal Processing System
 Real-Time Audio Processing using System-on-Chip
Real-Time Audio Processing using System-on-Chip






