Abstract
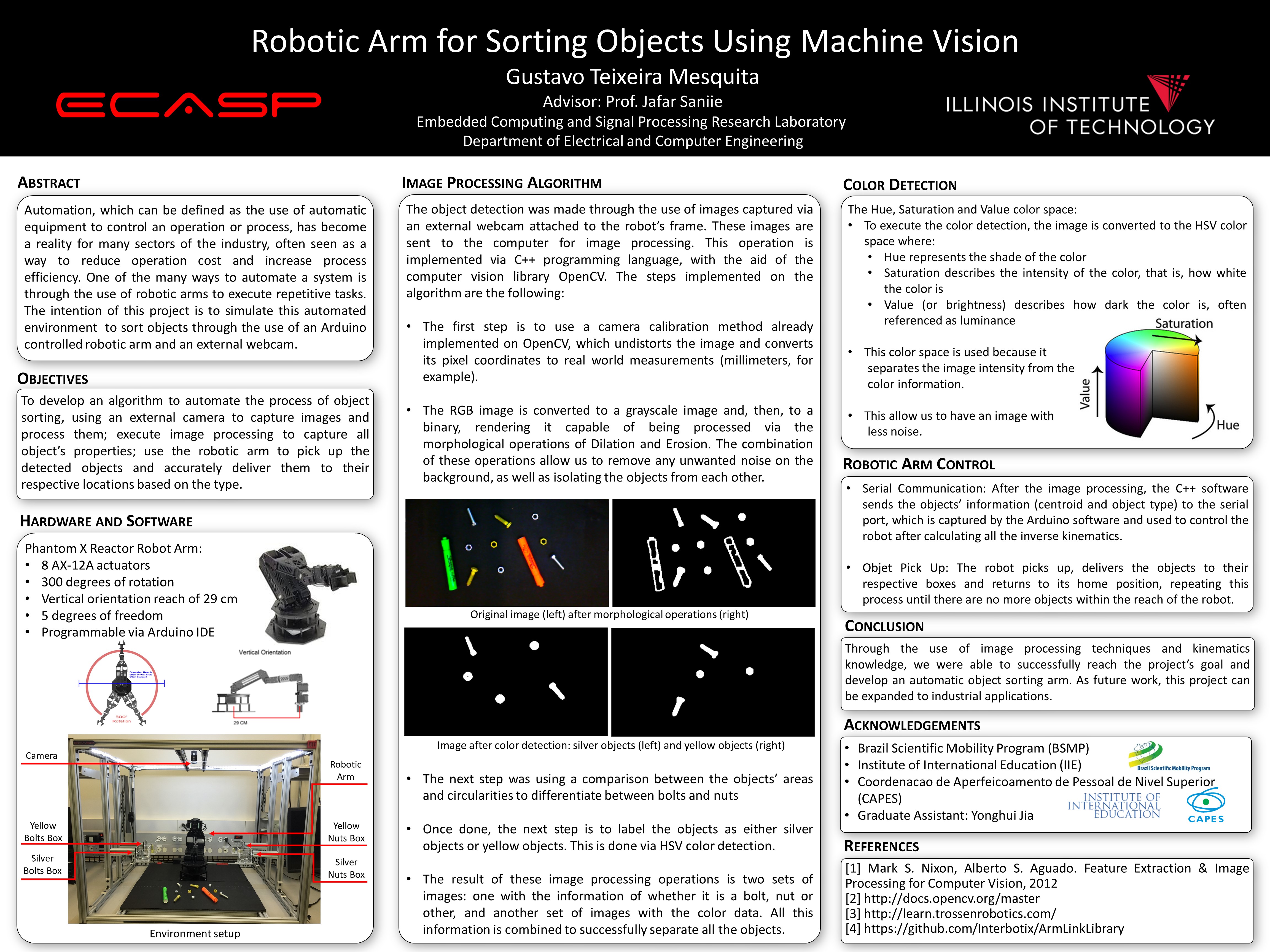
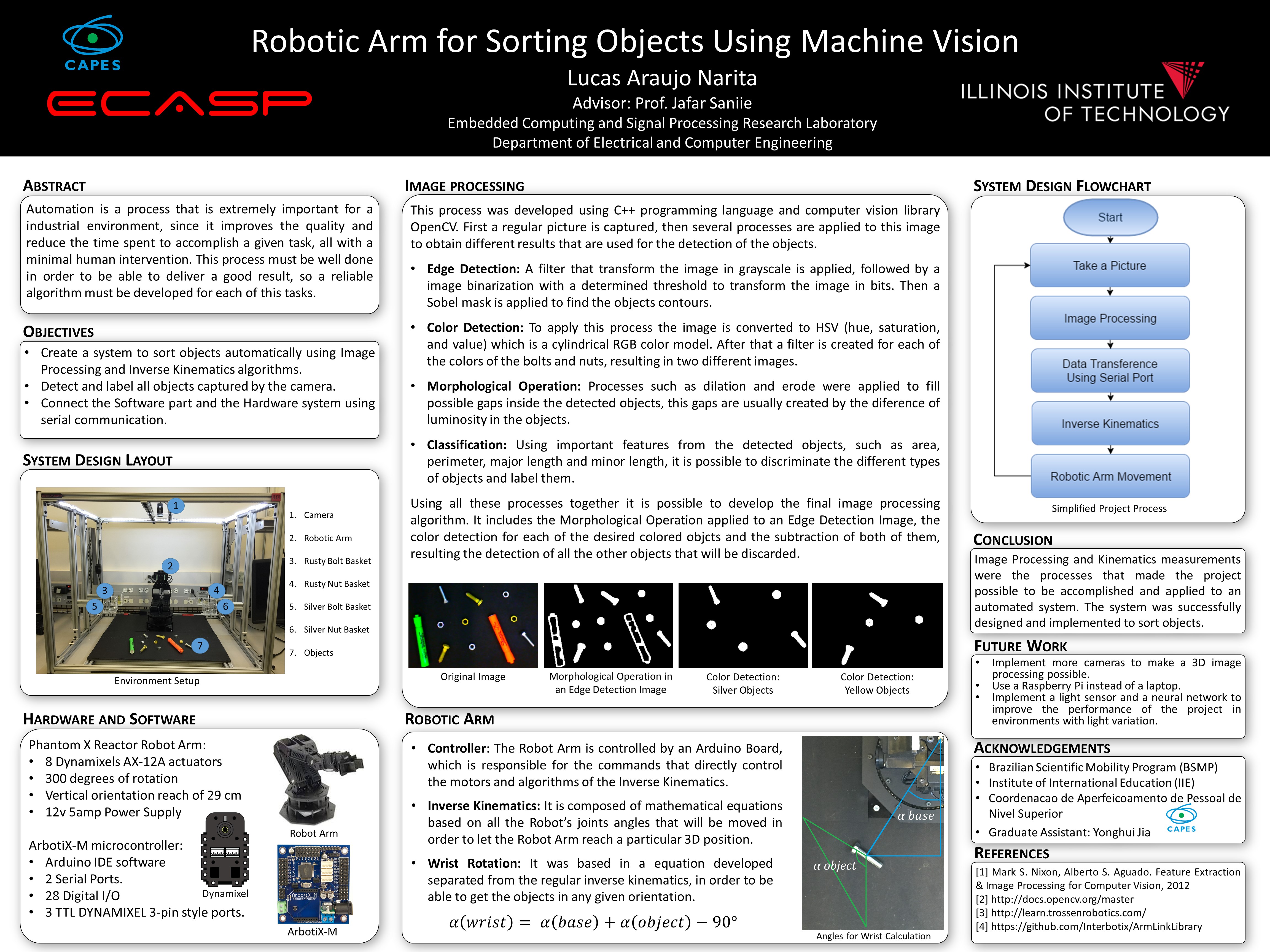
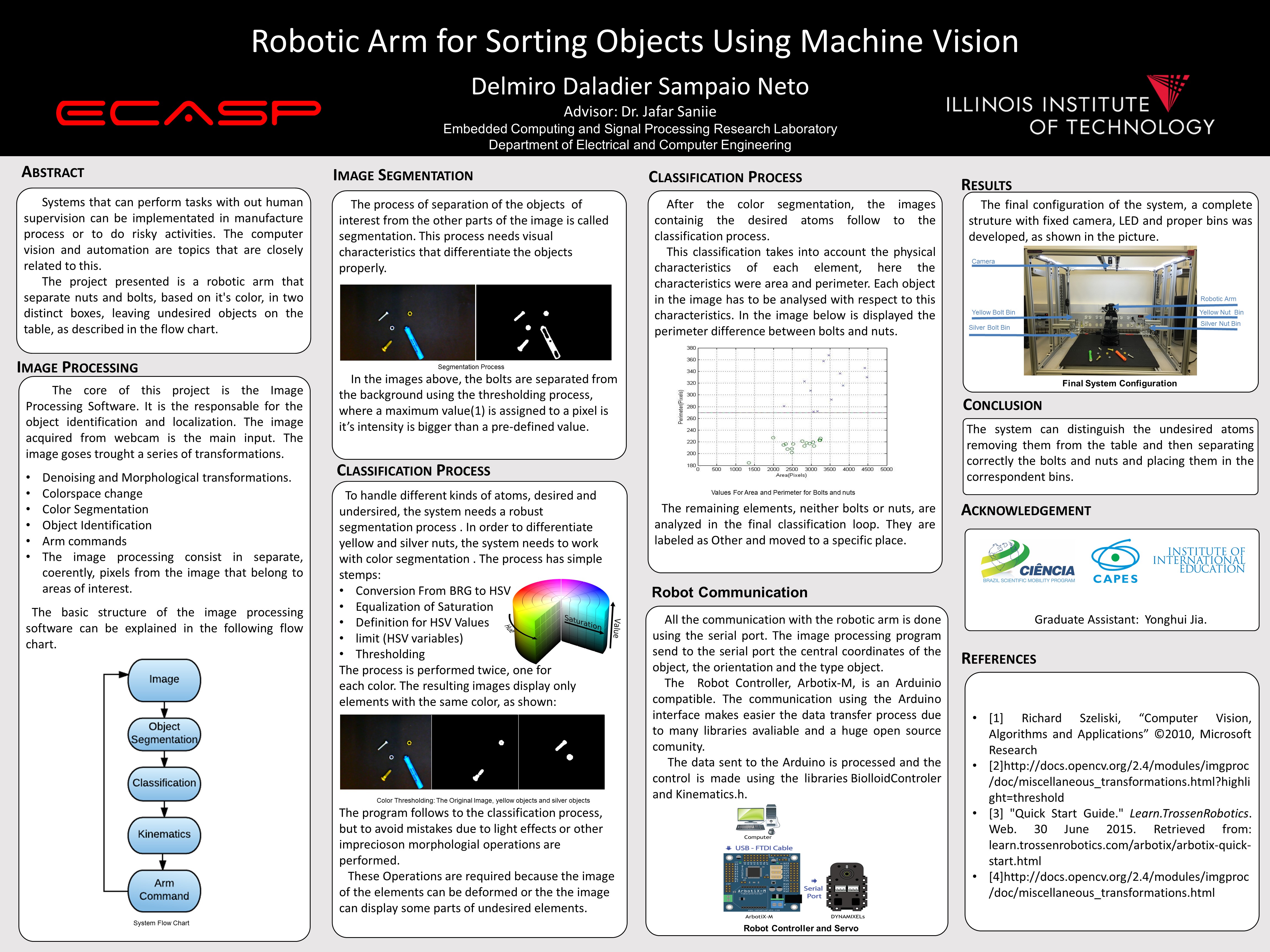
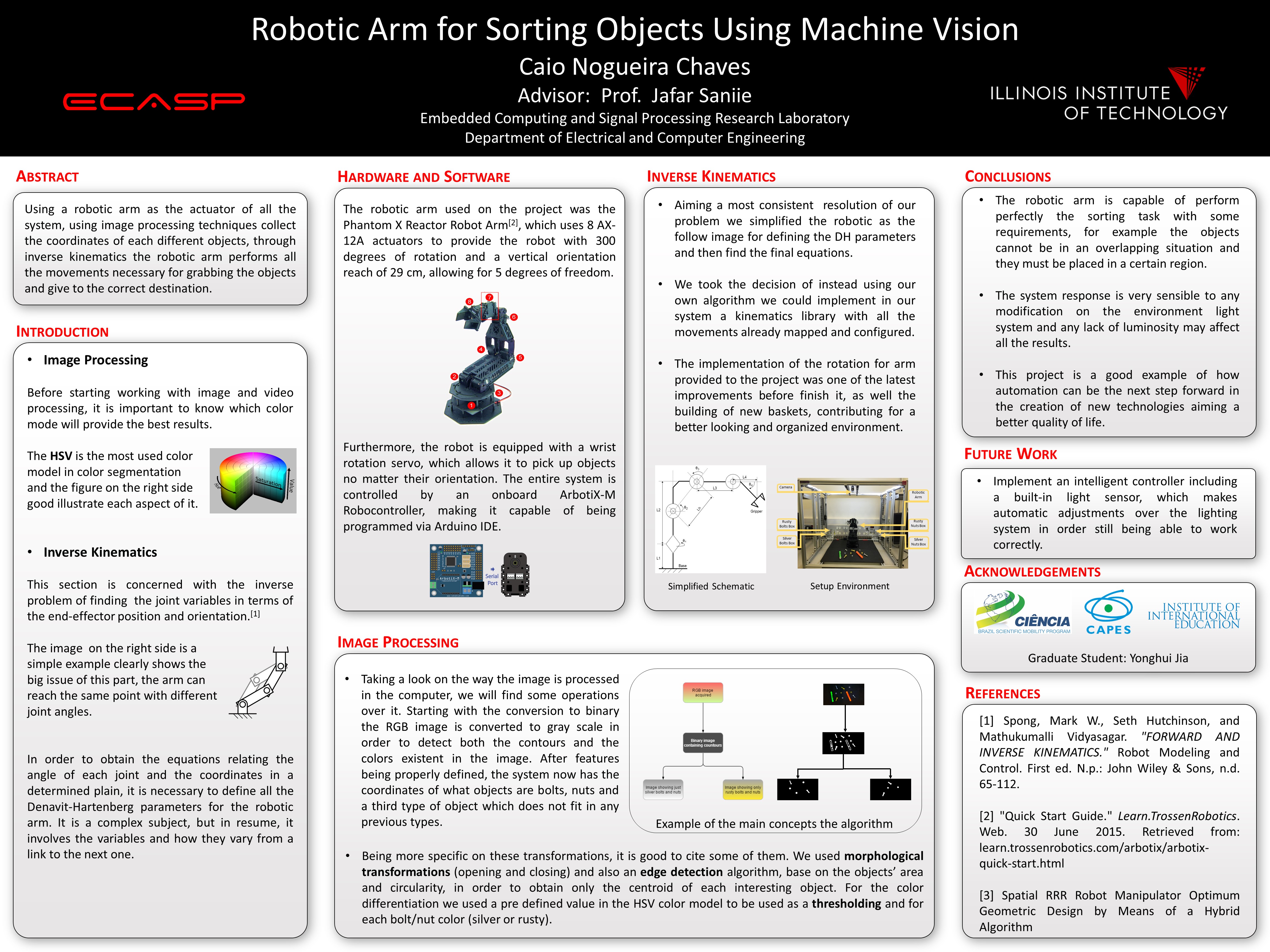
Automation, which can be defined as the use of automatic equipment to control an operation or process, has become a reality for many sectors of the industry, often seen as a way to reduce operation cost and increase process efficiency. One of the many ways to automate a system is through the use of robotic arms to execute repetitive tasks. The intention of this project is to simulate this automated environment sorting objects through the use of an Arduino controlled robotic arm and an external webcam to execute image processing.
Image processing has many different applications throughout the industry and it can be especially useful for automation purposes. Object detection for product sorting is a project that can be applied to innumerous types of manufacturing processes in order to optimize the operation, so this project shows to be extremely useful to be applied on the industry.
The objective of this project is to develop an algorithm to automate the process of object sorting, using an external camera to capture images and process them; execute image processing to capture all objects’ properties; use the robotic arm to pick up the detected objects and accurately deliver them to their respective locations based on their type.
Students' Posters (Click to enlarge)
 IPv6 based Protocol for Home Automation
IPv6 based Protocol for Home Automation
 High Performance Cryptology System
High Performance Cryptology System






