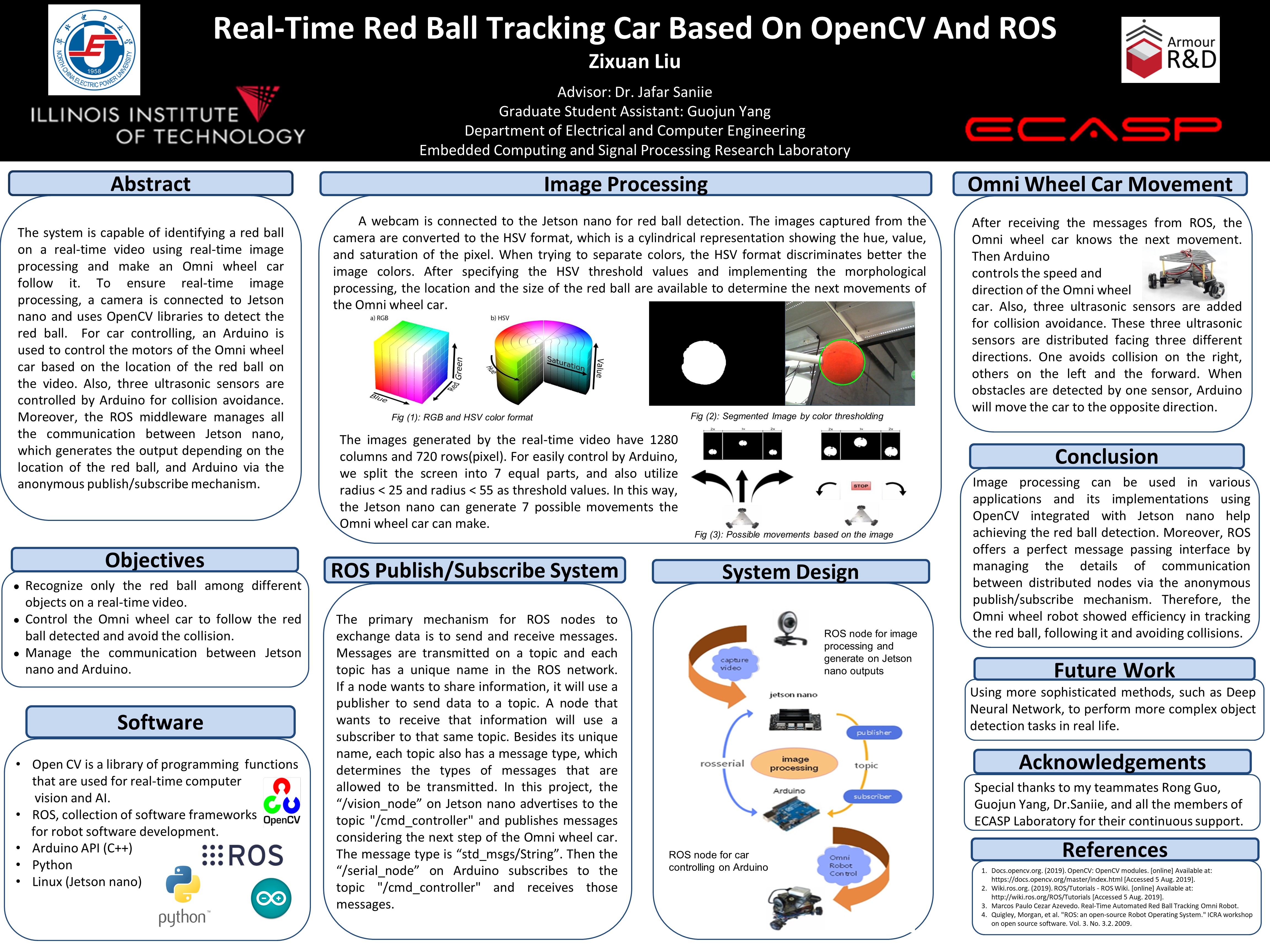
The system is capable of identifying a red ball on a real-time video using real-time image processing and make an Omni wheel car follow it. To ensure real-time image processing, a camera is connected to Jetson nano and uses OpenCV libraries to detect the red ball. For car controlling, an Arduino is used to control the motors of the Omni wheel car based on the location of the red ball on the video. Also, three ultrasonic sensors are controlled by Arduino for collision avoidance. Moreover, the ROS middleware manages all the communication between Jetson nano, which generates the output depending on the location of the red ball, and Arduino via the anonymous publish/subscribe mechanism.
![Rong Guo[A20455054].jpg](http://ecasp.ece.iit.edu/testxe/files/attach/images/9565/607/009/de004d0a846e9c548f60061b1c310995.jpg)
 Real-time Video Transmission and Processing using Xilinx ZYNQ...
Real-time Video Transmission and Processing using Xilinx ZYNQ...
 IoT Rehabilitation Assistance System based on Inertial 3D Mot...
IoT Rehabilitation Assistance System based on Inertial 3D Mot...










