The main objective of this project is to design and implement a terrestrial mobile robot that can be used in different contexts and able to change the navigation mode according to the task to be performed. Two modes of navigation must be present: an unmanned mode via a human action on a keyboard key and a standalone mode where the robot evolves without human intervention while being able to avoid obstacles. The battery of the rover must ensure the power supply sensors and actuators embedded on the robot while preserving the motor autonomy of the same robot (for monitoring activities, a high degree of autonomy is paramount).
The power supply will have to be independent and will have to provide the necessary power to the sensors and actuators arranged on the terrestrial robotics platform. Depending on the type of sensor, they can be powered with different voltages (3.3 V, 5 V, and 12 V).
The power supply system must provide a power between 10 and 15 Watts. Knowing that a sensor is a few watts, it is estimated that the system will feed several sensors for a half day minimum (~ 4 hours).
A digital interface on Ubuntu (Linux) will have to be realized in order to have an interface on which to control the robot remotely and without wires. The order will be, at first, on sight. The application should be representative of the functions available and should not interfere with the capabilities and responsiveness of the robot. The different modes of navigation possible (and features) should be accessible from this Ubuntu interface.
In order to articulate all the modules around a single master and to simplify the communication between the modules, we will use ROS system. ROS, which stands for Robot Operating System, is a set of software and tools that help create robotic applications. The goal of ROS is to create a standard in robotics, to no longer need to reinvent the wheel each time we start a new software for a robot.
A 2D map (3D possibility) of the robot environment will have to be created. This one will have to update according to the evolution of the robot in its space. The role of this card is to bring the project into another dimension. From the map, we can for example make measurements of a room or an autonomous navigation of the robot.
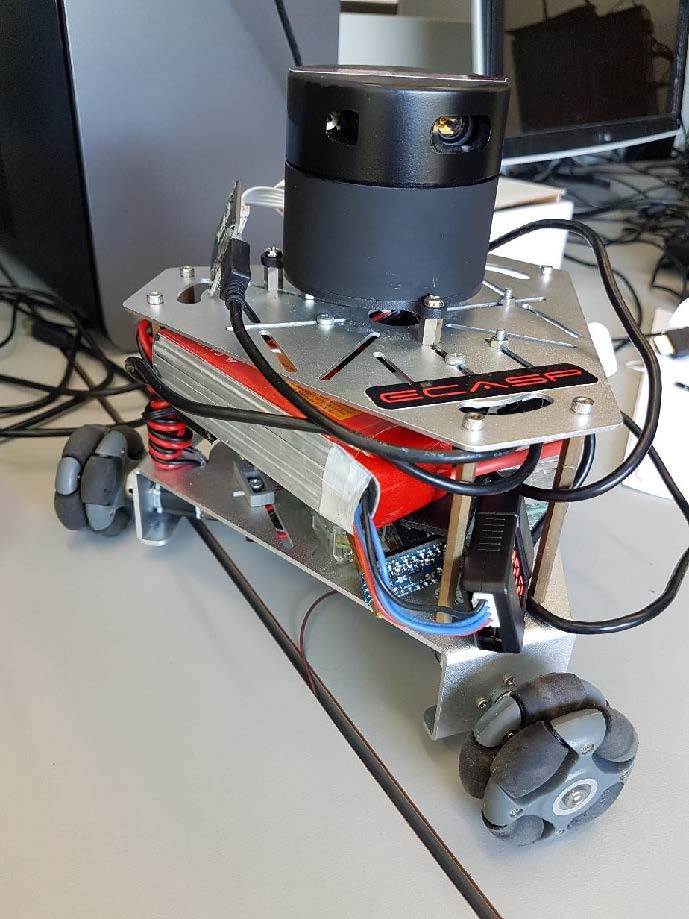
The robot will ship a camera, which will allow the operator to have a real-time feedback of the evolution of the robot in its environment. This will create a clear and precise 2D map and then integrate 3D.
The structure of the system, to the extent possible, should be flexible and designed to allow the system to be adapted to future needs. As examples, the structure of our robot is able to receive an IMU sensor, ultrasonic sensors...
 Home Automation Security System using Facial Recognition
Home Automation Security System using Facial Recognition
 Real-time Video Transmission and Processing using Xilinx ZYNQ...
Real-time Video Transmission and Processing using Xilinx ZYNQ...










