
Embedded Image and Video Processing Applications on Field Programmable Gate Arrays (FPGA) using a High-Level Synthesis

This hardware/software co-design platform has been implemented on a Xilinx Virtex-5 FPGA using a high-level synthesis and can be used to realise and test complex algorithms for real-time image and video processing applications. The video interface blocks are done in Register Transfer Languages and can be configured using the MicroBlaze processor allowing the support of multiple video resolutions. The image and video processing platform (IVPP) provides the required logic to easily plug-in the generated processing blocks without modifying the front-end (capturing video data) and the back-end (displaying processed output data). The IVPP can be a complete hardware solution for a broad range of real-time image/video processing applications including video encoding/decoding, surveillance, detection and recognition.
Publications:
Publications:
- Image and Video Processing Platform for Field Programmable Gate Arrays using a High-Level Synthesis
C. Desmouliers, E. Oruklu, S. Aslan, J. Saniie, F. Martinez
IET Computers & Digital Tecniques - LINK
- System-on-Chip Design using High-Level Synthesis Tools
E. Oruklu, R. Hanley, S. Aslan, C. Desmouliers, F. Martinez, J. Saniie
Journal of Circuits and Systems - LINK
- HW/SW Co-design Platform for Image and Video Processing Applications on Virtex-5 FPGA using PICO
C. Desmouliers, S. Aslan, E. Oruklu, J. Saniie, F. Martinez
2010 IEEE International Conference on Electro/Information Technology - LINK
- FPGA-Based Design of a High-Performance and Modular Video Processing Platform
C. Desmouliers, E. Oruklu, J. Saniie
2009 IEEE International Conference on Electro/Information Technology - LINK
Real-Time Traffic Sign and License Plate Localization for In-Car Driver Assistance Systems
Autonomous traffic sign detection can play a crucial role in many applications related to transportation safety and geographical information systems. The challenges that need to be addressed include the necessity for robust and accurate detection as well as the high computational requirements of the algorithms. Therefore, we develop a three stage algorithm that is based on i) detection of traffic sign locations using HSV color space, ii) detection of traffic signs using discriminative features and iii) recognition of traffic signs using interest point descriptors. The results show a robust detection and recognition performance for multiple signs and the algorithm can be executed in real-time.
Robust license plate localization and recognition consists of a three stage algorithm: 1) license plate localization; 2) character segmentation; and 3) feature extraction and character recogni-tion. The algorithm uses Mexican hat operator for edge detection and Euler number of a binary image for identifying the license plate region. A pre-processing step using median filter and contrast enhancement is employed to improve the character segmentation performance in case of low resolution and blur images. A unique feature vector comprised of region properties, projection data and reflection symmetry coefficient has been proposed. Back propagation artificial neural network classifier has been used to train and test the neural network based on the extracted feature. A thorough testing of algorithm is performed on a database with varying test cases in terms of illumination and different plate conditions.
Publications:
Robust license plate localization and recognition consists of a three stage algorithm: 1) license plate localization; 2) character segmentation; and 3) feature extraction and character recogni-tion. The algorithm uses Mexican hat operator for edge detection and Euler number of a binary image for identifying the license plate region. A pre-processing step using median filter and contrast enhancement is employed to improve the character segmentation performance in case of low resolution and blur images. A unique feature vector comprised of region properties, projection data and reflection symmetry coefficient has been proposed. Back propagation artificial neural network classifier has been used to train and test the neural network based on the extracted feature. A thorough testing of algorithm is performed on a database with varying test cases in terms of illumination and different plate conditions.
Publications:
- Design Flow of Vehicle License Plate Reader Based on RGB Color Extractor
Y. Jia, T. Gonnot, J. Saniie
2016 IEEE International Conference on Electro/Information Technology - LINK
- Real-Time Traffic Sign Detection and Recognition for In-Car Driver Assistance Systems
E. Oruklu, D. Pesty, J. Neveux, J.-E. Guebey
2012 IEEE 55th International Midwest Symposium on Circuits and Systems - LINK
- A Design Flow for Robust License Plate Localization and Recognition in Complex Scenes
D. Wazalwar, E. Oruklu, J. Saniie
Journal of Transportation Technlogies - LINK
- Design Flow for Robust License Plate Localization
D. Wazalwar, E. Oruklu, J. Saniie
2011 IEEE International Conference on Electro/Information Technology - LINK
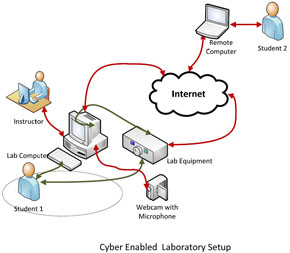
Cyber-Labs: A Real-time, Interactive, Secure Laboratory Environment for Remote Students
Distance learning using the Internet as q communication medium has been successful for instructional education. The paradigm of instructional education deals with a real time interaction between a tutor and students. The next phase of internet powered distance education is to enable laboratory based education. This can be achieved by providing an interactive, collaborative experience and live access to the equipment while an experiment is being conducted. The key objective of this study is to provide remote access capability for engineering laboratories and create cyber-enabled, hands-on laboratory environments. The primary challenges for a cyber-enabled laboratory include technological issues related to communication infrastructure as well as non-technical issues such as determining collaborative interaction among remote students. Based on these challenges, we have evaluated and developed software &
hardware components to provide a streamlined, web-centric laboratory experience for remote access students.
Publications:
Publications:
- Transforming Computer Engineering Laboratory Courses for Distance Learning and Collaboration
J. Saniie, E. Oruklu, R. Hanley, V. Anand, T. Anjali
International Journal of Engineering Education - LINK
- Collaborative Learning and Teamwork Over the Web
J. Saniie, V. Anand, R. Hanley, E. Oruklu, T. Anjali
2011 IEEE International Conference on Electro/Information Technology - LINK
- Cyber-Labs - A Real-time, Interactive, Secure Laboratory Environment for Remote Students(Abstract Conference Presentation)
J. Saniie, E. Oruklu, T. Anjali, V. Anand, R. Hanley
ACM SIGUCCS Management Symposium, April 2011
- Remote Access Environments for Computer Engineering Laboratories(Invited Presentations)
J. Saniie
NSF CCLI/TUES PI Conference, 2011 & 2013
- Paradigm Shifts in a Laboratory Environment Using Distance Learning(under revision)
J. Saniie, E. Oruklu, V. Anand, R. Hanley, T. Anjali
ACM Transactions on Computing Education, 2012 - LINK
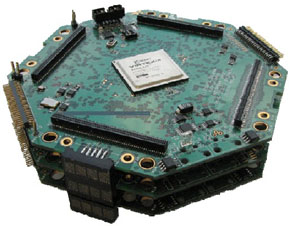
Acoustic MEMS Array and CAPTAN Architecture for Sound and Ultrasonic Imaging System
A novel, flexible and expandable data acquisition system architecture with a real-time signal processing capability was developed. The design of the architecture has been motivated by careful consideration of the common requirements shared by the many applications described above. The flexible and scalable nature of the architecture makes possible a wide variety of system solutions that are based on a common set of system components (including hardware, configware, and software). Associated with the data acquisition architecture a specially designed acoustic array was built and embedded on the system to solve problems related to acoustic source localization, and to prove this new data acquisition concept.The CAPTAN (Compact And Programmable daTa Acquisition Node) architecture is a distributed data acquisition and processing system that can be employed in a number of different applications ranging from test stand data acquisition systems to high performance parallel computing nodes. This architecture has the unique feature of being highly expandable, interchangeable, adaptable, and with a high computational power inherent to its design. The AMA (Acoustic MEMS Array) array conforms to the CAPTAN architecture, and is an acoustic array that employs sound, or ultrasound transducers in two dimensions, fully capable of beam steering on both horizontal and vertical planes. The AMA array takes full advantage of the CAPTAN architecture, and in this way it is fully scalable and planned to work on real-time applications. This unique combination gives the system many possible configurations to be deployed using distributed sensors, composed arrays and 3D arrays where applications such as sound source localization, and acoustic imaging are just a few of many where the system can be used.
Publications:
Publications:
- Real-time Independent Component Analysis Implementation and Applications
M. Turqueti, J. Saniie, E. Oruklu
2010 IEEE-NPSS Real Time Conference - LINK
- Acoustic Sensor Array for Sonic Imaging in Air
M. Turqueti, V. Kunin, B. Cardoso, J. Saniie, E. Oruklu
2010 IEEE Ultrasonics Symposium - LINK
- Acoustic Imaging System using the CAPTAN Architecture
M. Turqueti, J. Saniie, E. Oruklu
2010 IEEE Instrumentation and Measurement Technology Conference - LINK
- Scalable Acoustic Imaging Platform using MEMS Array
M. Turqueti, J. Saniie, E. Oruklu
2010 IEEE International Conference on Electro/Information Technology - LINK
- MEMS Acoustic Array Embedded in an FPGA Based Data Acquisition and Signal Processing System
M. Turqueti, J. Saniie, E. Oruklu
2010 IEEE International Midwest Symposium on Circuits and Systems - LINK
- Direction of Arrival Estimation and Localization Using Acoustic Sensor Arrays
V. Kunin, M. Turqueti, J. Saniie, E. Oruklu
Journal of Sensor Technology - LINK
- 3D Direction of Arrival Estimation and Localization using Ultrasonic Sensors in an Anechoic Chamber
V. Kunin, W. Jia, M. Turqueti, J. Saniie, E. Oruklu
2011 IEEE International Ultrasonics Symposium - LINK
Intelligent 3D Real-Time Skeletal Tracker - 3D Slide Viewer
This project consists of not only the development of an application based on Kinect’s skeletal recognition feature, but also of a deep research about the possibilities that this system offers, and the future directions and advances that may be achieved with the enhancement of this sensor. The raw output from the camera has been filtered to obtain a high performance intelligent skeletal tracker and movement detector. Based on these core modules, several features have been designed to create a friendly user interface and a complete application that will allow the user to interact with the Kinect to perform rich visual presentations. The application will include commands such as zoom in and zoom out that will be executed when the user makes 3D movements, captured by Kinect. The goal is to make the application understandable not only for software developers but also for business users. We highlight the development of a new set of tools based on PCL (Point Cloud Libraries), which are a set of open libraries that allow a wide range of new opportunities in this field of study. Their recentness and undeniable power make those libraries a tool of work that will be determinant for the development of the 3D imaging field.